Differential operators#
There are a huge number of possible ways to perform differencing in computational fluid dynamics, and BOUT++ is intended to be able to implement a large number of them. This means that the way differentials are handled internally is quite involved; see the developer’s manual for full gory details. Much of the time this detail is not all that important, and certainly not while learning to use BOUT++. Default options are therefore set which work most of the time, so you can start using the code without getting bogged down in these details.
In order to handle many different differencing methods and operations, many layers are used, each of which handles just part of the problem. The main division is between differencing methods (such as 4th-order central differencing), and differential operators (such as \(\nabla_{||}\)).
Differencing methods#
Methods are typically implemented on 5-point stencils (although exceptions are possible) and are divided into three categories:
Central-differencing methods, for diffusion operators \(\frac{df}{dx}\), \(\frac{d^2f}{dx^2}\). Each method has a short code, and currently include
C2: 2\(^{nd}\) order \(f_{-1} - 2f_0 + f_1\)C4: 4\(^{th}\) order \((-f_{-2} + 16f_{-1} - 30f_0 + 16f_1 - f_2)/12\)S2: 2\(^{nd}\) order smoothing derivativeW2: 2\(^{nd}\) order CWENOW3: 3\(^{rd}\) order CWENO
Upwinding methods for advection operators \(v_x\frac{df}{dx}\)
U1: 1\(^{st}\) order upwindingU2: 2\(^{nd}\) order upwindingU3: 3\(^{rd}\) order upwindingU4: 4\(^{th}\) order upwindingC2: 2\(^{nd}\) order centralC4: 4\(^{th}\) order centralW3: 3\(^{rd}\) order Weighted Essentially Non-Oscillatory (WENO)
Flux conserving and limiting methods for terms of the form \(\frac{d}{dx}(v_x f)\)
U1: 1\(^{st}\) order upwindingC2: 2\(^{nd}\) order centralC4: 4\(^{th}\) order central
Special methods :
FFT: Classed as a central method, Fourier Transform method in Z(axisymmetric) direction only. Currently available for
firstandsecondorder central difference
SPLIT: A flux method that splits into upwind and central terms\(\frac{d}{dx}(v_x f) = v_x\frac{df}{dx} + f\frac{dv_x}{dx}\)
WENO methods avoid overshoots (Gibbs phenomena) at sharp gradients such as shocks, but the simple 1st-order method has very large artificial diffusion. WENO schemes are a development of the ENO reconstruction schemes which combine good handling of sharp-gradient regions with high accuracy in smooth regions.
The stencil based methods are based by a kernel that combines the data
in a stencil to produce a single BoutReal (note upwind/flux methods
take extra information about the flow, either a BoutReal or
another stencil). It is not anticipated that the user would wish
to apply one of these kernels directly so documentation is not
provided here for how to do so. If this is of interest please look at
include/bout/index_derivs.hxx. Internally, these kernel routines
are combined within a functor struct that uses a BOUT_FOR loop
over the domain to provide a routine that will apply the kernel to
every point, calculating the derivative everywhere. These routines are
registered in the appropriate DerivativeStore and identified by
the direction of differential, the staggering, the type
(central/upwind/flux) and a key such as “C2”. The typical user does
not need to interact with this store, instead one can add the
following to the top of your physics module:
#include <derivs.hxx>
to provide access to the following routines. These take care of selecting the appropriate method from the store and ensuring the input/output field locations are compatible.
Function |
Formula |
|---|---|
DDX(f) |
\(\partial f / \partial x\) |
DDY(f) |
\(\partial f / \partial y\) |
DDZ(f) |
\(\partial f / \partial z\) |
D2DX2(f) |
\(\partial^2 f / \partial x^2\) |
D2DY2(f) |
\(\partial^2 f / \partial y^2\) |
D2DZ2(f) |
\(\partial^2 f / \partial z^2\) |
D4DX4(f) |
\(\partial^4 f / \partial x^4\) |
D4DY4(f) |
\(\partial^4 f / \partial y^4\) |
D4DZ4(f) |
\(\partial^4 f / \partial z^4\) |
D2DXDZ(f) |
\(\partial^2 f / \partial x\partial z\) |
D2DYDZ(f) |
\(\partial^2 f / \partial y\partial z\) |
VDDX(f, g) |
\(f \partial g / \partial x\) |
VDDY(f, g) |
\(f \partial g / \partial y\) |
VDDZ(f, g) |
\(f \partial g / \partial z\) |
FDDX(f, g) |
\(\partial/\partial x( f * g )\) |
FDDY(f, g) |
\(\partial/\partial x( f * g )\) |
FDDZ(f, g) |
\(\partial/\partial x( f * g )\) |
By default the method used will be the one specified in the options
input file (see Differencing methods), but most of these
methods can take an optional std::string argument (or a
DIFF_METHOD argument - to be deprecated), specifying exactly which
method to use.
User registered methods#
Note
The following may be considered advanced usage.
It is possible for the user to define their own
differencing routines, either by supplying a stencil using kernel or
writing their own functor that calculates the differential
everywhere. It is then possible to register these methods with the
derivative store (for any direction, staggering etc.). For examples
please look at include/bout/index_derivs.hxx to see how these
approaches work.
Here is a verbose example showing how the C2 method is
implemented.
DEFINE_STANDARD_DERIV(DDX_C2, "C2", 1, DERIV::Stanard) {
return 0.5*(f.p - f.m);
};
Here DEFINE_STANARD_DERIV is a macro that acts on the kernel
return 0.5*(f.p - f.m); and produces the functor that will apply
the differencing method over an entire field. The macro takes several
arguments;
the first (
DDX_C2) is the name of the generated functor – this needs to be unique and allows advanced users to refer to a specific derivative functor without having to go through the derivative store if desired.the second (
"C2") is the string key that is used to refer to this specific method when registering/retrieving the method from the derivative store.the third (
1) is the number of guard cells required to be able to use this method (i.e. here the stencil will consist of three values – the field at the current point and one point either side). This can be 1 or 2.the fourth (
DERIV::Standard) identifies the type of method - here a central method.
Alongside DEFINE_STANDARD_DERIV there’s also DEFINE_UPWIND_DERIV,
DEFINE_FLUX_DERIV and the staggered versions
DEFINE_STANDARD_DERIV_STAGGERED, DEFINE_UPWIND_DERIV_STAGGERED and
DEFINE_FLUX_DERIV_STAGGERED.
To register this method with the derivative store in X and Z with
no staggering for both field types we can then use the following code:
produceCombinations<Set<WRAP_ENUM(DIRECTION, X), WRAP_ENUM(DIRECTION, Z)>,
Set<WRAP_ENUM(STAGGER, None)>,
Set<TypeContainer<Field2D, Field3D>>,
Set<DDX_C2>>
someUniqueNameForDerivativeRegistration(registerMethod{});
For the common case where the user wishes to register the method in
X, Y and Z and for both field types we provide the helper
macros, REGISTER_DERIVATIVE and REGISTER_STAGGERED_DERIVATIVE
which could be used as REGISTER_DERIVATIVE(DDX_C2).
To simplify matters further we provide REGISTER_STANDARD_DERIVATIVE,
REGISTER_UPWIND_DERIVATIVE, REGISTER_FLUX_DERIVATIVE,
REGISTER_STANDARD_STAGGERED_DERIVATIVE,
REGISTER_UPWIND_STAGGERED_DERIVATIVE and
REGISTER_FLUX_STAGGERED_DERIVATIVE macros that can define and
register a stencil using kernel in a single step. For example:
REGISTER_STANDARD_DERIVATIVE(DDX_C2, "C2", 1, DERIV::Standard) { return 0.5*(f.p-f.m);};
Will define the DDX_C2 functor and register it with the derivative
store using key "C2" for all three directions and both fields with
no staggering.
Mixed second-derivative operators#
Coordinate derivatives commute, as long as the coordinates are globally well-defined, i.e.
When using paralleltransform = shifted or paralleltransform = fci (see
Parallel Transforms) we do not have globally well-defined coordinates. In those
cases the coordinate systems are field-aligned, but the grid points are at constant
toroidal angle. The field-aligned coordinates are defined locally, on planes of constant
\(y\). There are different coordinate systems for each plane. However, within each
local coordinate system the derivatives do commute. \(y\)-derivatives are taken in the
local field-aligned coordinate system, so mixed derivatives are calculated as
D2DXDY(f) = DDX(DDY(f))
D2DYDZ(f) = DDZ(DDY(f))
This order is simpler – the alternative is possible. Using second-order central difference operators for the y-derivatives we could calculate (not worring about communications or boundary conditions here)
Field3D D2DXDY(Field3D f) {
auto result{emptyFrom(f)};
auto& coords = *f.getCoordinates()
auto dfdx_yup = DDX(f.yup());
auto dfdx_ydown = DDX(f.ydown());
BOUT_FOR(i, f.getRegion()) {
result[i] = (dfdx_yup[i.yp()] - dfdx_ydown[i.ym()]) / (2. * coords.dy[i])
}
return result;
}
This would give equivalent results to the previous form [1] as yup and ydown give
the values of f one grid point along the magnetic field in the local field-aligned
coordinate system.
The \(x\mathrm{-}z\) derivative is unaffected as it is taken entirely on a plane of constant \(y\) anyway. It is evaluated as
D2DXDZ(f) = DDZ(DDX(f))
As the z-direction is periodic and the z-grid is not split across processors,
DDZ does not require any guard cells. By taking DDZ second, we do not have to
communicate or set boundary conditions on the result of DDX or DDY before taking
DDZ.
The derivatives in D2DXDY(f) are applied in two steps. First dfdy = DDY(f) is
calculated; dfdy is communicated and has a boundary condition applied so that all the
x-guard cells are filled. The boundary condition is free_o3 by default (3rd order
extrapolation into the boundary cells), but can be specified with the fifth argument to
D2DXDY (see Boundary conditions for possible options). Second DDX(dfdy) is
calculated, and returned from the function.
Non-uniform meshes#
examples/test-nonuniform seems to not work? Setting
non_uniform = true in the BOUT.inp options file enables corrections
to second derivatives in \(X\) and \(Y\). This correction is
given by writing derivatives as:
where \(i\) is the cell index number. The second derivative is therefore given by
The correction factor \(\partial/\partial i(1/\Delta x)\) can
be calculated automatically, but you can also specify d2x in the
grid file which is
The correction factor is then calculated from d2x using
Note: There is a separate switch in the Laplacian inversion code, which enables or disables non-uniform mesh corrections.
General operators#
These are differential operators which are for a general coordinate system.
where we have defined
not to be confused with the Christoffel symbol of the second kind (see the coordinates manual for more details).
Clebsch operators#
Another set of operators assume that the equilibrium magnetic field is written in Clebsch form as
where
is the background equilibrium magnetic field.
Function |
Formula |
|
\(\partial^0_{||} = \mathbf{b}_0\cdot\nabla = \frac{1}{\sqrt{g_{yy}}}{{\frac{\partial }{\partial y}}}\) |
|
\(\nabla^0_{||}f = B_0\partial^0_{||}(\frac{f}{B_0})\) |
|
\(\partial^2_{||}\phi = \partial^0_{||}(\partial^0_{||}\phi) = \frac{1}{\sqrt{g_{yy}}}{{\frac{\partial}{\partial y}}}(\frac{1}{\sqrt{g_{yy}}}){{\frac{\partial \phi}{\partial y}}} + \frac{1}{g_{yy}}\frac{\partial^2\phi}{\partial y^2}\) |
|
\(\nabla_{||}^2\phi = \nabla\cdot\mathbf{b}_0\mathbf{b}_0\cdot\nabla\phi = \frac{1}{J}{{\frac{\partial}{\partial y}}}(\frac{J}{g_{yy}}{{\frac{\partial \phi}{\partial y}}})\) |
|
\(\nabla_\perp^2 = \nabla^2 - \nabla_{||}^2\) |
|
Perpendicular Laplacian, neglecting all \(y\)
derivatives. The |
|
Poisson brackets. The Arakawa option, neglects the parallel \(y\) derivatives if \(g_{xy}\) and \(g_{yz}\) are non-zero |
We have that
In a Clebsch coordinate system \({{\boldsymbol{B}}} = \nabla z \times \nabla x = \frac{1}{J}{{\boldsymbol{e}}}_y\), \(g_{yy} = {{\boldsymbol{e}}}_y\cdot{{\boldsymbol{e}}}_y = J^2B^2\), and so the \(\nabla y\) term cancels out:
The bracket operators#
The bracket operator bracket(phi, f, method) aims to
differentiate equations on the form
Notice that when we use the Arakawa scheme, \(y\)-derivatives are
neglected if \(g_{xy}\) and \(g_{yz}\) are non-zero. An
example of usage of the brackets can be found in for example
examples/MMS/advection or examples/blob2d.
Finite volume, conservative finite difference methods#
These schemes aim to conserve the integral of the advected quantity over the domain. If \(f\) is being advected, then
is conserved, where the index \(i\) refers to cell index. This is done by calculating fluxes between cells: Whatever leaves one cell is added to another. There are several caveats to this:
Boundary fluxes can still lead to changes in the total, unless no-flow boundary conditions are used
When using an implicit time integration scheme, such as the default PVODE / CVODE, the total is not guaranteed to be conserved, but may vary depending on the solver tolerances.
There will always be a small rounding error, even with double precision.
The methods can be used by including the header:
#include "bout/fv_ops.hxx"
Note The methods are defined in a namespace FV.
Some methods (those with templates) are defined in the header, but others are defined in src/mesh/fv_ops.cxx. These operators use derived geometric quantities such as cell-face areas and cell volumes; see Derived geometric quantities.
Parallel divergence Div_par#
This function calculates the divergence of a flow in \(y\) (parallel to the magnetic field) by a given velocity.
template<typename CellEdges = MC>
const Field3D Div_par(const Field3D &f_in, const Field3D &v_in,
const Field3D &a, bool fixflux=true);
where f_in is the quantity being advected (e.g. density), v_in
is the parallel advection velocity. The third input, a, is the maximum
wave speed, which multiplies the dissipation term in the method.
ddt(n) = -FV::Div_par( n, v, cs );
By default the MC slope limiter is used to calculate cell edges, but this can
be changed at compile time e.g:
ddt(n) = -FV::Div_par<FV::Fromm>( n, v, cs );
A list of available limiters is given in section Slope limiters below.
Modified parallel divergence Div_par_mod#
This is a modified version of FV::Div_par which applies the limiter to both
the advected field and the velocity. This typically gives smaller overshoots
than FV::Div_par for the same limiter choice.
template<typename CellEdges = MC>
Field3D Div_par_mod(const Field3D &f_in, const Field3D &v_in,
const Field3D &a, Field3D &flow_ylow,
bool fixflux=true);
The extra output argument flow_ylow stores the flow through the lower
\(y\) cell boundary, including the area factor. This can be useful as a
diagnostic in energy or flux budgets. For FCI fields this diagnostic is
currently returned as zero.
Parallel momentum flux Div_par_fvv#
This operator calculates the divergence of \(f v v\), and is mainly useful for the parallel momentum equation:
template<typename CellEdges = MC>
Field3D Div_par_fvv(const Field3D &f_in, const Field3D &v_in,
const Field3D &a, bool fixflux=true);
This is provided separately rather than forming \(fv\) first, so that the reconstructed values of \(f\) and \(v\) remain consistent with the other finite-volume advection operators.
Parallel momentum-flux heating Div_par_fvv_heating#
This operator is a companion to FV::Div_par_fvv. It calculates the heating
associated with the numerical momentum-flux discretisation, and returns a
diagnostic for the kinetic-energy flow through the lower \(y\) cell face:
template<typename CellEdges = MC>
Field3D Div_par_fvv_heating(const Field3D &f_in, const Field3D &v_in,
const Field3D &a, Field3D &flow_ylow,
bool fixflux=true);
The returned field is intended for use in parallel momentum and energy systems
where FV::Div_par_fvv is used in the momentum equation. The extra output
argument flow_ylow stores the lower-face kinetic-energy flow, including the
area factor. For FCI fields this diagnostic is currently returned as zero.
As with the other finite-volume parallel operators, fixflux=true adjusts
boundary fluxes to remain consistent with the imposed boundary values.
Perpendicular finite-volume operators#
The finite-volume operators in bout/fv_ops.hxx also include conservative
perpendicular operators. The baseline operator
FV::Div_a_Grad_perp(a, f) calculates
\(\nabla \cdot \left( a \nabla_\perp f \right)\) in flux-conservative form:
Field3D Div_a_Grad_perp(const Field3D &a, const Field3D &f);
There is also a limited variant:
template<typename CellEdges = MC>
Field3D Div_a_Grad_perp_limit(const Field3D &a, const Field3D &g,
const Field3D &f);
This calculates \(\nabla \cdot \left( a g \nabla_\perp f \right)\) using a limited reconstruction of \(g\) on cell faces. The arguments are:
a- the transport coefficientg- the factor reconstructed and upwinded at cell facesf- the field whose perpendicular gradient is used
In the \(x\) direction, the chosen CellEdges limiter is used to
reconstruct cell-edge values of \(g\). In the \(y\) direction,
first-order upwinding is used. As with FV::Div_par, the template parameter
selects the limiter family described in Slope limiters.
Example and convergence test#
The example code examples/finite-volume/fluid/ solves the Euler
equations for a 1D adiabatic fluid, using FV::Div_par for
the advection terms.
where \(n\) is the density, \(p\) is the pressure, and
\(nv_{||}\) is the momentum in the direction parallel to the
magnetic field. The operator \(\nabla_{||}\) represents the
divergence of a parallel flow (Div_par), and \(\partial_{||}
= \mathbf{b}\cdot\nabla\) is the gradient in the parallel direction.
There is a convergence test using the Method of Manufactured Solutions (MMS) for this example.
See section Method of Manufactured Solutions for details of the testing method. Running the runtest
script should produce the graph
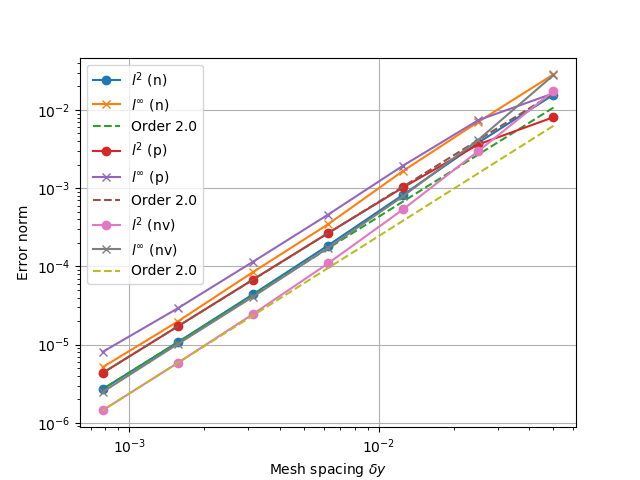
Fig. 8 Convergence test, showing \(l^2\) (RMS) and \(l^{\infty}\) (maximum) error for
the evolving fields n (density), p (pressure) and nv (momentum). All fields are
shown to converge at the expected second order accuracy.#
Parallel diffusion#
The parallel diffusion operator calculates \(\nabla_{||}\left[k\partial_||\left(f\right)\right]\)
const Field3D Div_par_K_Grad_par(const Field3D &k, const Field3D &f,
bool bndry_flux=true);
This is done by calculating the flux \(k\partial_{||}\left(f\right)\) on cell boundaries using central differencing.
For FCI meshes there is also a PETSc-based support-operator implementation which constructs sparse matrix parallel operators from grid metadata. That interface is documented separately in Parallel operators with PETSc (FCI).
Parallel diffusion with flow diagnostic Div_par_K_Grad_par_mod#
This variant of the parallel diffusion operator also returns a lower-face flow diagnostic:
Field3D Div_par_K_Grad_par_mod(const Field3D &k, const Field3D &f,
Field3D &flow_ylow,
bool bndry_flux=true);
As for Div_par_mod, flow_ylow stores the lower \(y\) boundary flow
including the area factor. For FCI fields this diagnostic is currently returned
as zero.
Advection in 3D#
This operator calculates \(\nabla\cdot\left( n \mathbf{v} \right)\) where \(\mathbf{v}\) is a 3D vector. It is written in flux form by discretising the expression
Like the Div_par operator, a slope limiter is used to calculate the value of
the field \(n\) on cell boundaries. By default this is the MC method, but
this can be set as a template parameter.
template<typename CellEdges = MC>
const Field3D Div_f_v(const Field3D &n, const Vector3D &v, bool bndry_flux)
Slope limiters#
Here limiters are implemented as slope limiters: The value of a given
quantity is calculated at the faces of a cell based on the cell-centre
values. Several slope limiters are defined in fv_ops.hxx:
Upwind- First order upwinding, in which the left and right edges of the cell are the same as the centre (zero slope).Fromm- A second-order scheme which is a fixed weighted average of upwinding and central difference schemes.MinMod- This second order scheme switches between the upwind and downwind gradient, choosing the one with the smallest absolute value. If the gradients have different signs, as at a maximum or minimum, then the method reverts to first order upwinding (zero slope).MC(Monotonised Central) is a second order scheme which switches between central, upwind and downwind differencing in a similar way toMinMod. It has smaller dissipation thanMinModso is the default.Superbee- A more compressive TVD limiter thanMCorMinMod. It tends to sharpen steep gradients and contacts more aggressively, at the cost of being less smooth.VanAlbada- A smooth (differentiable) symmetric slope limiter which avoids piecewise branches at extrema. This can be useful for nonlinear solvers and finite-difference Jacobian calculations.WENO3- A third-order smooth WENO (Jiang-Shu) cell-face reconstruction using a three-point stencil. This is typically less dissipative than TVD slope limiters, but is not strictly monotonicity-preserving.
Useful resources on slope limiters include:
Staggered grids#
By default, all quantities in BOUT++ are defined at cell centre, and all derivative methods map cell-centred quantities to cell centres. Switching on staggered grid support in BOUT.inp:
StaggerGrids = true
allows quantities to be defined on cell boundaries. Functions such as
DDX now have to handle all possible combinations of input and output
locations, in addition to the possible derivative methods.
Several things are not currently implemented, which probably should be:
Only 3D fields currently have a cell location attribute. The location (cell centre etc) of 2D fields is ignored at the moment. The rationale for this is that 2D fields are assumed to be slowly-varying equilibrium quantities for which it won’t matter so much. Still, needs to be improved in future
Twist-shift and X shifting still treat all quantities as cell-centred.
No boundary condition functions yet account for cell location.
Currently, BOUT++ does not support values at cell corners; values can only be defined at cell centre, or at the lower X,Y, or Z boundaries. This is
Once staggered grids are enabled, two types of stencil are needed: those which map between the same cell location (e.g. cell-centred values to cell-centred values), and those which map to different locations (e.g. cell-centred to lower X).
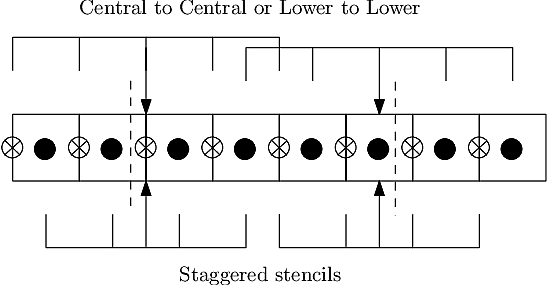
Fig. 9 Stencils with cell-centred (solid) and lower shifted values (open). Processor boundaries marked by vertical dashed line#
Central differencing using 4-point stencil:
Input |
Output |
Actions |
|---|---|---|
Central stencil |
||
CENTRE |
XLOW |
Lower staggered stencil |
XLOW |
CENTRE |
Upper staggered stencil |
XLOW |
Any |
Staggered stencil to CENTRE, then interpolate |
CENTRE |
Any |
Central stencil, then interpolate |
Any |
Any |
Interpolate to centre, use central stencil, then interpolate |
Table: DDX actions depending on input and output locations. Uses first match.
Derivatives of the Fourier transform#
By using the definition of the Fourier transformed, we have
this gives
where we have used that \(f(x,y,\pm\infty)=0\) in order to have a well defined Fourier transform. This means that
In our case, we are dealing with periodic boundary conditions. Strictly speaking, the Fourier transform does not exist in such cases, but it is possible to define a Fourier transform in the limit which in the end lead to the Fourier series [2] By discretising the spatial domain, it is no longer possible to represent the infinite amount of Fourier modes, but only \(N+1\) number of modes, where \(N\) is the number of points (this includes the modes with negative frequencies, and the zeroth offset mode). For the discrete Fourier transform, we have
where \(k\) is the mode number, \(N\) is the number of points in \(z\). If we call the sampling points of \(z\) for \(z_Z\), where \(Z = 0, 1 \ldots N-1\), we have that \(z_Z = Z \text{d}z\). As our domain goes from \([0, 2\pi[\), we have that (since we have one less line segment than point) \(\text{d}z (N-1) = L_z = 2\pi - \text{d}z\), which gives \(\text{d}z = \frac{2\pi}{N}\). Inserting this is equation ((4)) yields
The discrete version of equation ((3)) thus gives