Code layout#
BOUT++ is organised into classes and groups of functions which operate on them: It’s not purely object-oriented, but takes advantage of many of C++’s object-oriented features.
Fig. 21 shows the most important parts of BOUT++ and how they fit together.
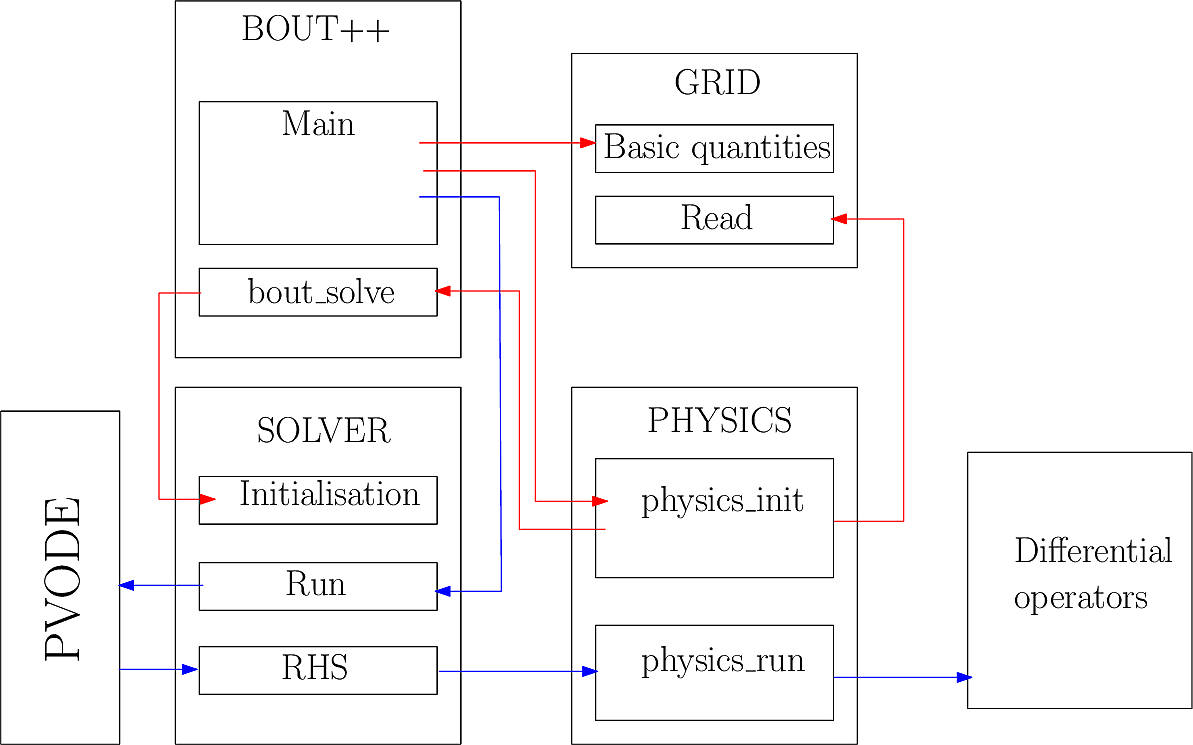
Fig. 21 Overview of BOUT++ control flow during initialisation (red), and running (blue)#
The initialisation process is shown in red: basic information is first
read from the grid file (e.g. size of the grid, topology etc.), then
the user-supplied initialisation code is called. This code can read
other variables from the grid, and makes at least one call to
PhysicsModel::bout_solve() to specify a variable to be evolved. The
main thing bout_solve does is to add
these variables to the solver.
The process of running a timestep is shown in blue in
Fig. 21: The main loop calls the solver, which in turn
calls PVODE. To evolve the system PVODE makes calls to the RHS
function inside solver. This moves data between PVODE and BOUT++, and
calls the user-supplied PhysicsModel::rhs() code to calculate
time-derivatives. Much of the work calculating time-derivatives
involves differential operators.
Calculation of the RHS function, and handling of
data in BOUT++ involves many different
components. Fig. 22 shows (most) of the classes and
functions involved, and the relationships between them. Some thought
was put into how this should be organised, but it has also changed
over time, so some parts could be cleaner.
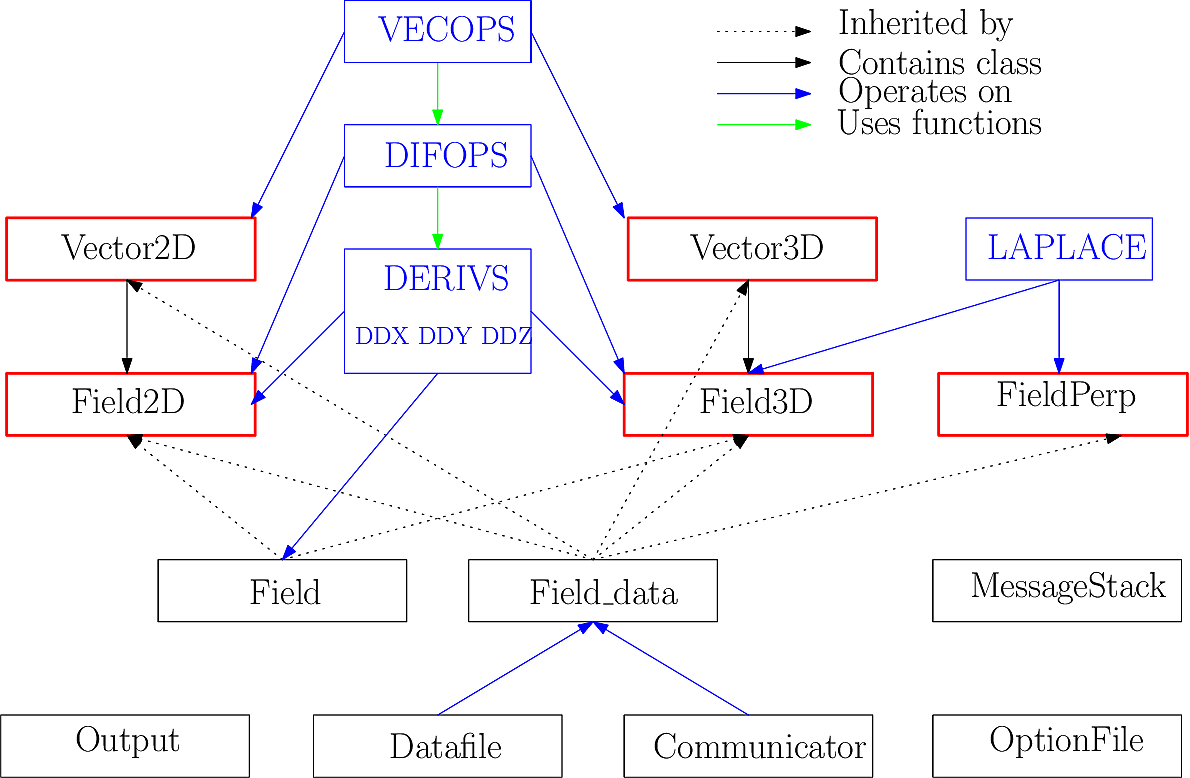
Fig. 22 Relationship between important classes and functions used in calculating the RHS function#
Directories#
The source code for the core of BOUT++ is divided into include files
(which can be used in physics models) in bout++/include, and source
code and low-level includes in bout++/src. Many parts of the code
are defined by their interface, and can have multiple different
implementations. An example is the time-integration solvers: many
different implementations are available, some of which use external
libraries, but all have the same interface and can be used
interchangeably. This is reflected in the directory structure inside
bout++/src. A common pattern is to store individual implementations
of an interface in a subdirectory called impls.
include/foo.hxx
src/.../foo.cxx
src/.../foo_factory.hxx
src/.../foo_factory.cxx
src/.../impls/one/one.hxx
src/.../impls/one/one.cxx
where foo.hxx defines the interface, foo.cxx implements common
functions used in several implementations. foo_factory creates new
implementations, and is the only file which includes all the
implementations. Individual implementations are stored in their own
subdirectories of impls. Components which follow this pattern
include fileio formats, invert/laplace and invert/parderiv
inversion codes, mesh, and solver.
The current source code files are:
bout++.cxx: Main file which initialises, runs and finalises BOUT++. Currently contains a
mainfunction, though this is being removed shortly.field
field2d.cxx implements the
Field2Dclass. This is a scalar field which varies only in \(x\) and \(y\) and is used for things like metric tensor components and initial profiles. It supplies lots of overloaded operators and functions on these objects.field3d.cxx implements the
Field3Dclass, which varies in \(x\), \(y\) and \(z\). Since these handle a lot more memory than Field2D objects, the memory management is more complicated and includes reference counting. See section Memory management for more details.field_data.cxx Implements some functions in the
FieldDataclass. This is a mainly pure virtual interface class which is inherited byField2DandField3D.fieldperp.cxx implements a
FieldPerpclass to store slices perpendicular to the magnetic field i.e. they are a function of \(x\) and \(z\) only. This is mainly used for Laplacian inversion routines, and needs to be integrated with the other fields better.initialprofiles.cxx routines to set the initial values of fields when a simulation first starts. Reads settings from the option file based on the name of the variable.
vecops.cxx a collection of function to operate on vectors. Contains things like
Grad,DivandCurl, and uses a combination of field differential operators (in difops.cxx) and metric tensor components (inMesh).vector2d.cxx implements the
Vector2Dclass, which uses aField2Dobject for each of its 3 components. Overloads operators to supply things like dot and cross products.vector3d.cxx implements
Vector3Dby using aField3Dobject for each component.where.cxx supplies functions for choosing between values based on selection criteria.
invert
fft_fftw.cxx implements the fft.hxx interface by calling the Fastest Fourier Transform in the West (FFTW) library.
invert / laplace
- invert_laplace.cxx uses Fourier
decomposition in \(z\) combined with tri- and band-diagonal solvers in \(x\) to solve Laplacian problems.
impls
serial_tri
serial_band
spt
invert / parderiv
invert_parderiv.cxx inverts a problem involving only parallel \(y\) derivatives. Intended for use in some preconditioners.
impls
cyclic
- lapack_routines.cxx supplies an
interface to the LAPACK linear solvers, which are used by the
invert_laplaceroutines.
mesh
boundary_factory.cxx creates boundary condition operators which can then be applied to fields. Described in section Boundary factory.
boundary_region.cxx implements a way to describe and iterate over boundary regions. Created by the mesh, and then used by boundary conditions. See section Boundary regions for more details.
boundary_standard.cxx implements some standard boundary operations and modifiers such as
NeumannandDirichlet.difops.cxx is a collection of differential operators on scalar fields. It uses the differential methods in derivs.cxx and the metric tensor components in
Meshto compute operators.interpolation.cxx contains functions for interpolating fields
mesh.cxx is the base class for the
Meshobject. Contains routines useful for allMeshimplementations.impls
bout
boutmesh.cxx implements a mesh interface which is compatible with BOUT grid files.
physics
- gyro_average.cxx
gyro-averaging operators
smoothing.cxx provides smoothing routines on scalar fields
sourcex.cxx contains some useful routines for creating sources and sinks in physics equations.
solver
solver.cxx is the interface for all solvers
impls
cvode
ida
petsc
pvode
sys
boutexception.cxx is an exception class which are used for error handling
derivs.cxx contains basic derivative methods such as upwinding, central difference and WENO methods. These are then used by difops.cxx. Details are given in section Differential operators.
msg_stack.cxx is part of the error handling system. It maintains a stack of messages which can be pushed onto the stack at the start of a function, then removed (popped) at the end. If an error occurs or a segmentation fault is caught then this stack is printed out and can help to find errors.
options.cxx provides an interface to the BOUT.inp option file and the command-line options.
range.cxx Provides the RangeIterator class, used to iterate over a set of ranges. Described in section Iterating over ranges
timer.cxx a class for timing parts of the code like communications and file I/O. Described in section Timing
utils.cxx contains miscellaneous small useful routines such as allocating and freeing arrays.
options